 公司簡介
公司簡介 企業(yè)文化
企業(yè)文化 榮譽資質
榮譽資質 企業(yè)裝備
企業(yè)裝備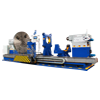 重型臥式車床系列
重型臥式車床系列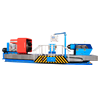 軋輥車床系列
軋輥車床系列 大型臥式車床系列
大型臥式車床系列 數(shù)控端面車床系列
數(shù)控端面車床系列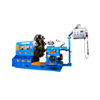 大型落地車床系列
大型落地車床系列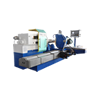 車銑磨組合機床系列
車銑磨組合機床系列 立式車床系列
立式車床系列 龍門銑床系列
龍門銑床系列 公司新聞
公司新聞 行業(yè)動態(tài)
行業(yè)動態(tài) 常見問題
常見問題

 歐洲
歐洲 南美洲
南美洲 北美洲
北美洲 中東
中東 東南亞
東南亞 東亞
東亞數(shù)控系統(tǒng)的振蕩現(xiàn)象已成為數(shù)控全閉環(huán)系統(tǒng)的共同性問題。系統(tǒng)振蕩時會造成機床產生爬行與振動故障,尤其在臥式帶立柱的軸和旋轉數(shù)控工作臺軸其系統(tǒng)出現(xiàn)振蕩的頻率較高。該問題已成為影響數(shù)控車床正常使用的重要因素之一。
數(shù)控車床的振蕩故障通常發(fā)生在機械部分和進給伺服系統(tǒng)。產生振蕩的原因有很多,陳了機械方面存在不可消除的傳動間隙、彈性變形、摩擦阻力等諸多因素外,伺服系統(tǒng)的有關參數(shù)的影響也是重要的一方面。伺服系統(tǒng)有交流和直流之分。大部分數(shù)控機床采用的是全閉環(huán)方式,引起伺服系統(tǒng)振動的原因大致有四種情況:
傳動機械裝如絲杠間隙太大。這些控制環(huán)的輸出參數(shù)失真或機械傳動裝置間隙太大都是引起振動的主要因素。它們都可以通過伺服控制系統(tǒng)進行參數(shù)優(yōu)化。
有些數(shù)控伺服系統(tǒng)采用的是半閉環(huán)裝置,而全閉環(huán)伺服系統(tǒng)必須是在其局部半閉環(huán)系統(tǒng)不發(fā)生振蕩的前提下進行參數(shù)調整,所以兩者大同小異。
在伺服系統(tǒng)中有參考的標準值,出現(xiàn)振蕩可適當降低增益,但不能降太多,因為要保證系統(tǒng)的穩(wěn)態(tài)誤差。
負載慣量比一般設置在發(fā)生振動時所示參數(shù)的70%左右,如不能消除故障,不宜繼續(xù)降低該參數(shù)值。
比例微積分器是一個多功能控制器,它不僅能有效地對電流電壓信號進行比例增益,同時可調節(jié)輸出信號滯后成超前的問題,振蕩故障有時因輸出電流電壓發(fā)生滯后成超前情況而產生,這時可通過PID來調節(jié)輸出電流電壓相位。
以上討論的是有關低頻振蕩時參數(shù)優(yōu)化方法,而有時數(shù)控系統(tǒng)會因機械上某些振蕩原因產生反饋信號中含有高頻諧波,這使輸出轉矩里不恒定,從而產生振動。對于這種高頻振蕩情況,可在速度環(huán)上加入一階低通濾波環(huán)節(jié),即為轉矩濾波器。
速度指令與速度反饋信號經速度控制器轉化為轉矩信號,轉矩信號通過一階濾波環(huán)節(jié)將高頻成分截止,從而得到有效的轉矩控制信號。通過調節(jié)參數(shù)可將機械產生的100Hz以上的頻率截止,從而達到消除高頻振蕩的效果。

 客服1
客服1  客服2
客服2